Insights
J.S. Held Acquires Shechter & Everett to Expand Forensic Accounting Capabilities for Family Law Disputes in Florida
Read MoreThe material in this paper was researched, compiled, and written by J.S. Held. It was originally published by SAE International.
Approaching an intersection and braking to a stop, as well as accelerating from a stop, is a common occurrence in daily life. While the experience is routine, the actual rate of deceleration and acceleration has not been analyzed from an orthogonal aerial perspective. The aerial perspective provides video footage that allows for accurate planar motion tracking and does not influence the drivers’ actions in any way. This paper examines the behavior of drivers at two separate signal light controlled intersections to determine both the rate at which they slow down to a stop, and also the rate at which they accelerate through the intersection after a signal change. The paper will also address the acceleration rate differences of vehicles who are first to reach the intersection in comparison to those that are directly behind another vehicle, as well as the lag in reaction between vehicles as they begin to accelerate from a stop.
In the field of accident reconstruction, determination of a stopped vehicle’s acceleration from an intersection is often required for analysis of time-space relationships relating to a collision. Similarly, the deceleration rates of a vehicle approaching a yellow or red light at an intersection may be required. A single acceleration value is commonly assigned to a vehicle throughout its entire acceleration sequence, which may under- or overestimate the vehicle’s speed at points through the motion analysis. The acceleration of passenger vehicles from a stop has been extensively studied in peer reviewed literature, however there is little research relating to the acceleration and deceleration of passenger vehicles at controlled intersections in a naturalistic style. In addition, no studies were found which compare the accelerations of vehicles in either the first or second row position at an intersection, nor the lag time in acceleration for second row vehicles.
Fugger, et al., [1] conducted a study in which the “real world” perception reaction times and accelerations for stationary vehicles reacting to a signal change were analyzed. For this study, data was captured of 100 vehicles at two intersections with a 120Hz digital camcorder placed at ground level. The timing of vehicles crossing each intersection were used to determine the driver perception/reaction times and vehicle accelerations. They found that the acceleration could be modeled with two phases: the initial phase lasted for a mean time of 0.94 seconds with an acceleration rate of 0.06 g, and the secondary phase was characterized by an acceleration rate of 0.22 g.
Chang, et al., [2] studied driver behavior to changes in traffic signals when approaching an intersection. In this study, Chang utilized data from 579 stopping vehicles with varying roadway and traffic conditions and found that the mean deceleration rate for stopping vehicles was 9.5 ft/sec2, or approximately 0.295 g. Chang noted that the observed deceleration rate “is primarily the result of the driver’s selection of comfort. It is not an indication of whether they can perform certain deceleration rates.”
Haas, et al., [3] analyzed driver acceleration and deceleration behavior at stop sign-controlled intersections, which included 299 deceleration events from 24 drivers and 214 acceleration events from 22 drivers. Haas concluded that deceleration rates varied based on the stopping vehicle’s initial speed, ranging from 0.1 g for initial speeds between 20 and 25 mph to an average deceleration rate of 0.18 g for initial speeds between 35 and 40 mph. The study concluded an average acceleration rate of 0.14 g regardless of final speed.
Wortman, et al., [4] studied driver behavior associated with a traffic signal at six intersections during both day and night. Data was collected using a super 8 mm movie camera recording at 18 frames per second placed near the intersection. The study reported mean deceleration rates ranging from 7.0 ft/sec2 (0.22 g) to 13.9 ft/sec2 (0.43 g) for the various intersections. The mean deceleration for all intersections was 11.6 ft/sec2 (0.36 g). Additionally, the study found the difference in daytime and nighttime deceleration rates was not statistically significant.
Roenitz, et al, [5] studied the characteristic behavior of drivers decelerating for known hazards. Data was collected using a battery-operated radar gun with raw data being stored to an interfacing computer. A total of 313 decelerations were recorded at a variety of stop sign controlled intersections in varying weather conditions. Roenitz concluded that vehicle deceleration could be modeled with three phases: The “Initiation Phase,” lasting approximately 3 seconds, was characterized by a deceleration rate of 0.064 g. An average deceleration rate of 0.216 g was determined for the “Active Braking Phase,” which included most of a vehicle’s deceleration. The final phase discussed is the “Completion Phase,” in which vehicles dissipate their final 3.4 km/h of speed, lasting approximately 1.7 seconds.
Kodsi and Muttart, [6] conducted a study in which the naturalistic acceleration profiles of passenger vehicles were observed at two-way-stop controlled intersections. Data was captured using a video camera recording at 30 frames per second placed perpendicular to the vehicle’s direction of travel. Vehicles were tracked until they were either out of camera frame or up to 15 meters from the stop line. 244 vehicles were tracked, with 179 of them coming to a complete stop before proceeding through the intersection. The authors found that the acceleration could be modeled with two phases: the initial phase lasted for approximately 0.90 seconds with an acceleration rate of 0.07 g, and the second phase lasted for approximately 2.1 seconds with an acceleration rate of 0.25 g.
This paper evaluates data collected from two signal light controlled intersections to determine the acceleration and deceleration profiles of passenger vehicles in a naturalistic scenario. This analysis is intended to expand on the testing referenced above and derive acceleration and deceleration profiles for accident reconstruction purposes. This study also expands on previous research by including factors relevant to the field of accident reconstruction, such as whether the vehicle is the first in line or the vehicle directly behind, and the vehicle’s speed when approaching the controlled intersection.
A data collection method for vehicles was presented in the 2019 SAE publication by Carter, et al., in which the authors developed a video tracking technique for automated tracking of left turning vehicles from overhead video footage, which was recorded with a small unmanned aerial system (sUAS) [7]. The 2019 paper validated the video tracking process with VBOX data to verify its accuracy. This analysis method was also used in a 2020 paper published by the authors of this paper, which presented acceleration models for left-turning heavy trucks [8].
The aerial video tracking process was utilized for this research to collect data from two urban intersections, which captured 178 accelerating and 212 decelerating vehicles that were used for analysis of time, distance, speed, and longitudinal acceleration and deceleration. The acceleration tests include 95 vehicles which were first to reach the intersection and 83 vehicles which were second to reach the intersection. Additionally, 85 of the 178 accelerating vehicles were positioned on the inside lane (lane 1). The deceleration tests include 111 vehicles which were first to reach the intersection, and 101 vehicles which were second to reach the intersection. 104 of the 212 decelerating vehicles were positioned on the inside travel lane (lane 1). The rest of the tracked vehicles were positioned in the outside travel lane (lane 2), as shown in Figure 6.
Multiple intersections in the greater Denver metropolitan area were inspected for suitability for data collection; two were selected using the following criteria: sufficient flow of passenger vehicle traffic, multiple travel lanes, and no airspace restrictions for longer duration sUAS flights for video capture. The two intersections that were selected for data collection are listed below in Table 1.
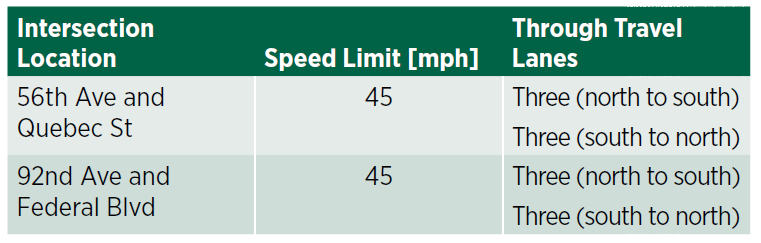
Figure 1 and Figure 2 show aerial images of each intersection taken from a DJI Mavic 2 Pro sUAS during data collection.


56th Ave and Quebec St form a mid-sized, controlled intersection in Commerce City, CO, which has a posted speed limit of 45 mph for northbound and southbound traffic. There are three through travel lanes for both northbound and southbound directions, separated by a concrete median, and there are double left turn lanes for both directions at 56th Ave. Areas where data was collected for accelerating and decelerating vehicles are shown outlined in Figure 3, along with a label for the intersection width, which was measured between the stop lines of the innermost southbound travel lane. The red section indicates the tracking area for decelerating vehicles while the green area indicates the tracking area for accelerating vehicles. The orange area represents the overlap between acceleration and deceleration zones.

92nd Ave and Federal Blvd is a mid-sized, controlled intersection in Westminster, CO, which has a posted speed limit of 45 mph for northbound and southbound traffic. There are three straight travel lanes for both northbound and southbound directions, separated by a concrete median, and there are double left turn lanes for both directions at 92nd Ave. Areas where data was collected for accelerating and decelerating vehicles are shown in Figure 4, along with a label for the intersection width, which was measured between the crosswalks of the innermost southbound travel lane. The red section indicates the tracking area for decelerating vehicles while the green area indicates the tracking area for accelerating vehicles. The orange area represents the overlap between acceleration and deceleration zones.

Data was collected at each intersection with a DJI Mavic 2 Pro sUAS. All flights were operated in Class G airspace in accordance with the Federal Aviation Administration (FAA) Small Unmanned Aircraft Regulations, Part 107, by a licensed remote pilot. The sUAS was flown at 400 feet above ground level, and video was recorded with the camera facing 90 degrees downward to generate video as close to perpendicular to traffic flow as possible.
Overhead video captured from each intersection was reviewed and clips were exported of each accelerating and decelerating vehicle for input into the video tracking process. Video footage was reviewed and tracked vehicles which could not be classified as passenger vehicles were removed from the analysis. These excluded vehicles include box trucks, heavy trucks, and motorcycles. For acceleration, the start of a given tracked run was identified as when the vehicle first began to move forward across the intersection from its initial stopped position. The end of a run was determined by when the vehicle began exiting the frame after proceeding through the intersection. For deceleration, the start of a given tracked run began when the vehicle first entered the frame and ended when it first reached a complete stop. The video tracking process outputs are a video labeled with tracked objects and a text file containing those vehicles’ X and Y coordinates for each video frame, in pixels. The point at which passenger vehicles are tracked is approximately centered over the vehicle. Figure 5 shows a frame from the video output with labeled tracked objects from the 56th Ave and Quebec St intersection.

The tracking data for each passenger vehicle was then processed utilizing the same techniques as presented in SAE 2019-01-0421 and 2020-01-0882, such as a two-pass Butterworth filter and scaling from pixels to feet. Vehicle data was categorized based on the intersection, whether the vehicle was accelerating or decelerating, and if the vehicle was in the first or second row at the intersection.
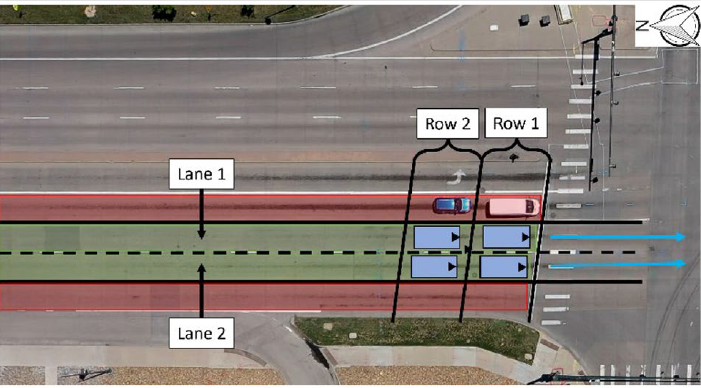
All runs were processed, and calculations were performed to generate the average and peak longitudinal accelerations and decelerations for each tracked vehicle. Vehicles were categorized based on whether they were leaving or approaching the intersection and whether they were the first or second car to reach the intersection in their lane. Vehicles in the left and right turn lanes were excluded from the analysis due to inconsistent interference caused by other turning vehicles. Figure 6 shows lane and row designations for tracked vehicles at the 56th and Quebec intersection, with the analyzed travel lanes highlighted in green and omitted lanes highlighted in red. For this research paper, only first and second row vehicles were tracked and analyzed at each intersection.
Once the tracked vehicles’ accelerations and decelerations were determined for each dataset, the values were plotted against all other runs to analyze the effects of row position on the average and peak longitudinal accelerations and decelerations. Distinctions were also made for variations between the two intersections. The following sections outline the data analysis process.
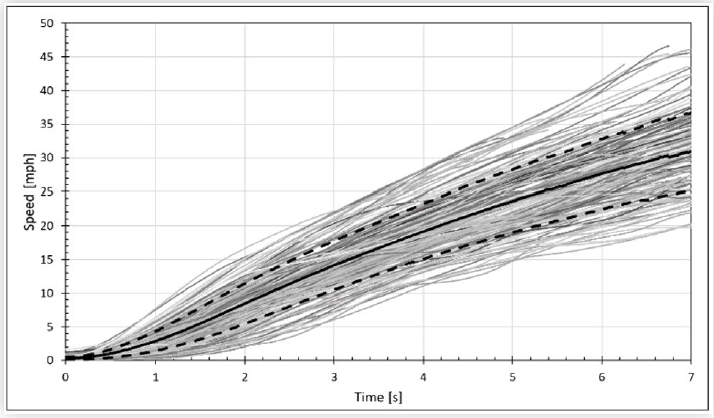
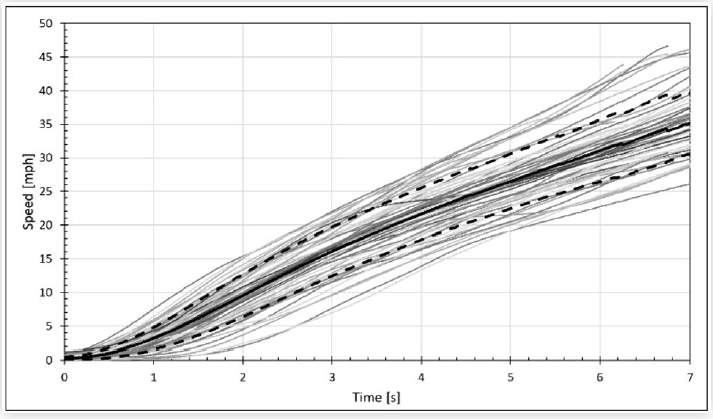
Speed data for all tracked accelerating vehicles was plotted with respect to time, starting with the frame the vehicle began moving. Figure 7 shows the average tracked vehicle speeds for all acceleration runs. Individual runs are shown in gray, the average of all tracked runs is indicated with a solid black line, and the area between the dotted black lines represent 70 percent of the data, with the tests outside of the dotted black lines representing the top and bottom 15 percent of the data.
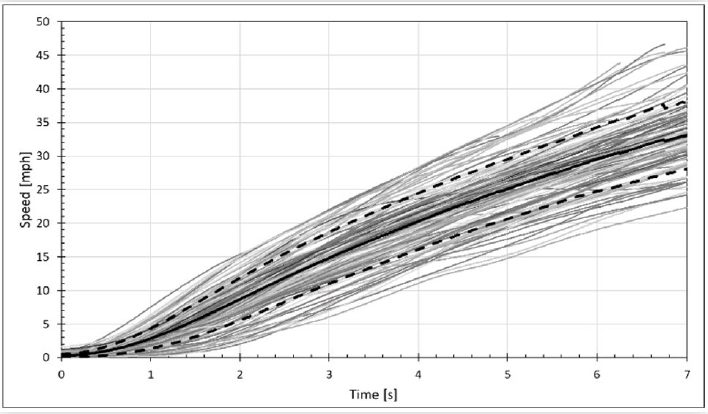
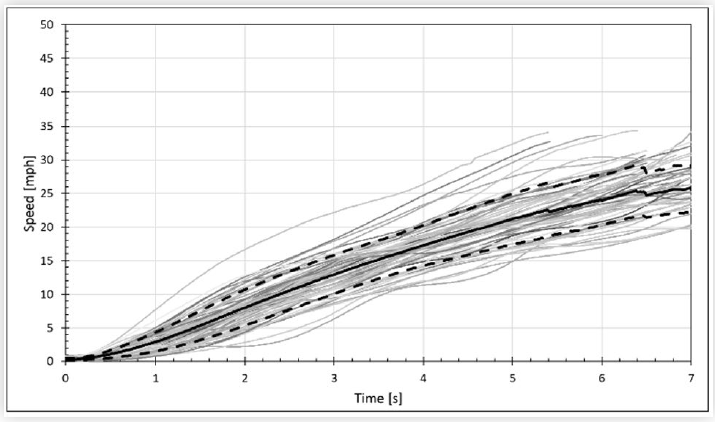
Tracked runs were divided into two datasets based on the intersection in which the data was recorded, preventing any influence of the intersection on effects caused by differences in vehicle row. Figure 8 shows the average speeds of all tracked accelerating vehicles over time at the 56th and Quebec intersection.
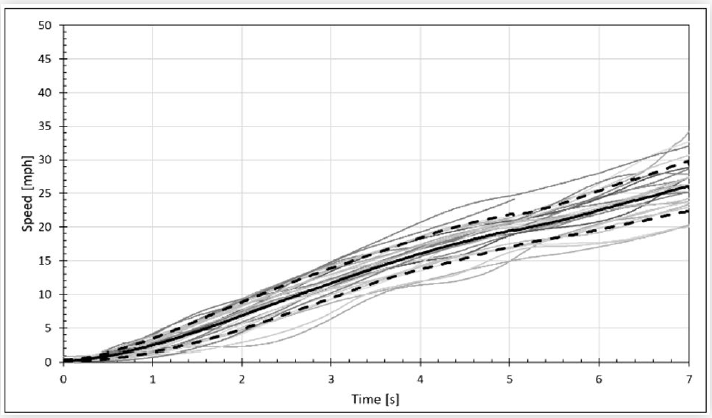
Runs from the 56th and Quebec intersection were then subdivided into two groups: vehicles that were first to reach the intersection, and vehicles directly behind the lead vehicle at the intersection. Division of runs based on row allows for analysis of the effect of row on the acceleration of vehicles from an intersection, such as the authors’ hypothesis that the second row vehicles’ acceleration and deceleration rates are tied to the rates of the vehicles preceding them in the first row. Figure 9 and Figure 10 show the speed versus time plots for first and second row vehicles, respectively.

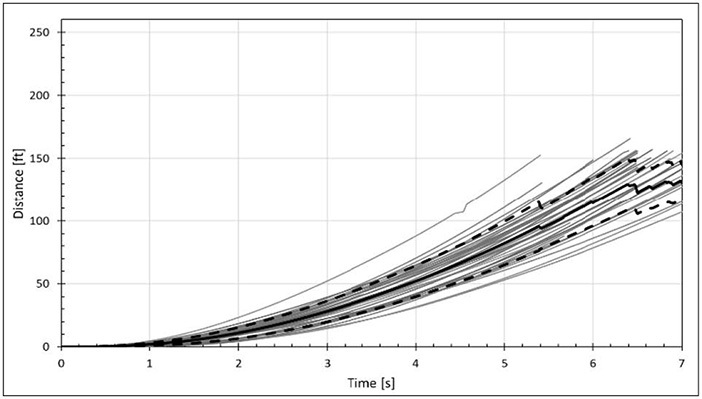
When analyzing the motion of a vehicle accelerating from a stop, an accident reconstructionist typically uses the vehicle’s distance traveled to determine its speed at impact. In this study, vehicles positioned in the second row were tracked for a greater distance than first row vehicles due to their starting position in the video frame. For further analysis of the effect of row on acceleration, plots were made which compare the distance traveled for tracked vehicles to their acceleration time. Figure 11 shows the average distance traveled for first row vehicles based on their acceleration time. Figure 12 shows a similar plot for all second row vehicles.


Acceleration data collected from 92nd and Federal was separated and processed in the same manner as data the data collected from 56th and Quebec. The average speed versus time plot for all tracked vehicles from 92nd and Federal is shown in Figure 13.
Runs from 92nd and Federal were split into first and second row vehicles as described with the data from 56th and Quebec. Figure 14 and Figure 15 show the average speed versus time plots for the accelerating first and second row vehicles, respectively.

Average distance versus time plots were also created from the data for accelerating first and second row vehicles at 92nd and Federal, which are shown in Figure 16 and Figure 17.

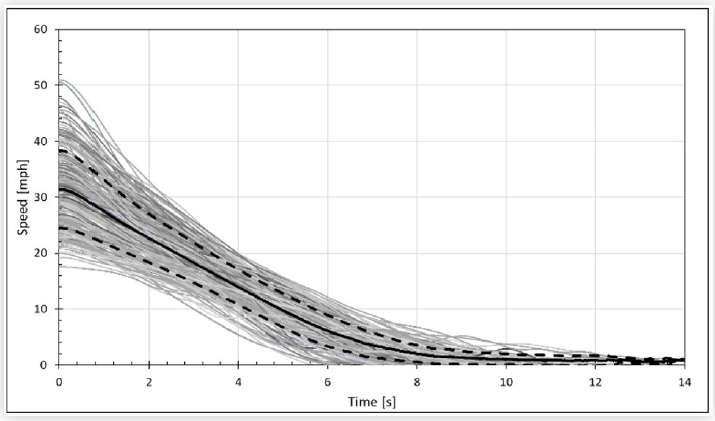
Speed data for all tracked decelerating vehicles was plotted with respect to time, starting when the vehicle entered frame and ending when the vehicle came to a stop at the intersection. Figure 18 shows the average tracked vehicle speeds for all deceleration runs over time. As with the acceleration plots, individual runs are shown in gray, the average of all tracked runs is indicated with a solid black line, and the area between the dotted black lines represent 70 percent of the data, with the tests outside of the dotted black lines representing the top and bottom 15 percent of the data.
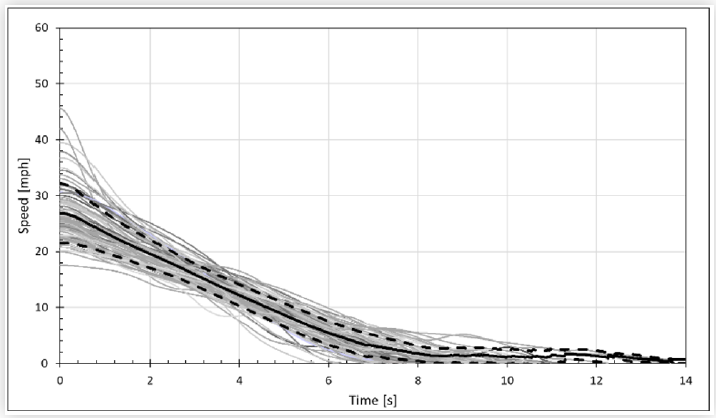
Tracked runs were divided into two sets based on the intersection in which the data was recorded, preventing any influence of the intersection on effects caused by differences in vehicle row. Figure 19 shows the average speeds of all tracked decelerating vehicles at the 56th and Quebec intersection.
Deceleration runs from the 56th and Quebec intersection were then subdivided into two plots for vehicles which were first to reach the intersection (row 1) and vehicles which were second to reach the intersection (row 2). Figure 20 and Figure 21 show the speed versus time plots for first and second row vehicles, respectively.



Deceleration data collected from 92nd and Federal was separated and processed in the same manner as data the data collected from 56th and Quebec. The average speed versus time plot for all tracked vehicles from 92nd and Federal is shown in Figure 22.
Runs from 92nd and Federal were split into first and second row vehicles as described with the data from 56th and Quebec. Figure 23 and Figure 24 show the average speed versus time plots for the decelerating first and second row vehicles, respectively.


Acceleration
Inspection of the acceleration plot for all tracked runs show a wide range of speeds reached during tracking, ranging from approximately 25-45 mph; however, the data shows a clear trend of acceleration with multiple different phases. A few of the vehicles fell well outside the norm or showed erratic accelerations mostly due to the software losing the vehicle for a period of time before reacquiring them. Therefore, in analyzing the data, these vehicles were removed from the data sets.
Separation of the data based on the intersection from which the data was collected produces a narrower range of speeds respective to the size of the intersections. Further separating the data into groups based on vehicles stopped in the first row versus vehicles stopped in the second row at the intersection demonstrates the differences in actions from leading drivers versus following drivers, who are constrained by the leading vehicle. While separating the data into subsets generates specific trends for each classification at a given intersection, the overall acceleration profile of all tracked runs closely follows those of the subsets.
Examination of the speed versus time plot for all tracked acceleration runs shows multiple distinct phases of acceleration. In order to most closely approximate the average acceleration presented in the plots, the acceleration was broken into four separate time ranges: 0-1 seconds, 1-3 seconds, 3-5 seconds, and 5-7 seconds. The initial phase of acceleration, taking place within the first second of movement, is characterized by a 0.12 g acceleration rate. During this time, the driver is likely transferring from the brake pedal to the gas pedal, which allows the vehicle to roll forward with minimal acceleration at or near engine idle speed for some portion of the first second of acceleration. The second phase of acceleration (1-3 seconds) is characterized by an acceleration of 0.26 g. Most vehicles tracked during this study recorded their peak acceleration during the second phase. As time progresses beyond the second phase, the rate of acceleration for tracked vehicles begins to decrease, which first becomes evident in the third phase of acceleration (3-5 seconds). During this phase, tracked vehicles had an average acceleration rate of 0.22 g, which is less than the peak acceleration seen during the second phase. In the fourth phase of acceleration (5-7 seconds), vehicles began approaching the speed limit, resulting in a drop in the average rate of acceleration to 0.17 g. Figure 25 shows the speed versus time data for all tracked runs, with the four phase acceleration model trendline shown with different colors for each phase.

The acceleration model trendline is shown in Figure 26 with plots of individual test runs removed for clarity.

Comparison of the acceleration profiles for vehicles in the first row versus vehicles in the second row show slight variations in acceleration over all four phases. As seen in the plots, vehicles accelerating from the first row tended to have a higher rate of acceleration than those starting from the second row. The authors hypothesize that this change in acceleration results from the first row drivers having a clear view and lane for accelerating, while drivers in the second row are limited by the acceleration of the vehicle in front of them and do not have a clear view of the road ahead. As vehicles began approaching the speed limit, the variation in accelerations became negligible. When analyzing the data from both intersections, vehicles in the first row accelerated to approximately 32 mph within the first 7 seconds of tracking, while second row vehicles accelerated to approximately 28 mph. As can be seen in Figure 14, many of the first row vehicles at 92nd and Federal were not tracked for a full 7 seconds. This is likely due to the shorter distance required for first row vehicles to clear the intersection in comparison to second row vehicles. To account for the loss of data, it was determined that using a time range of 5-6.4 seconds for the final phase of acceleration most accurately represented the data for those vehicles.
Separating data by intersection reveals similar trends as seen when analyzing all tracked runs. For the 56th and Quebec intersection, first row vehicles accelerated to approximately 36 mph during the first 7 seconds, and second row vehicles accelerated to approximately 31 mph. Fewer vehicles at the 92nd and Federal intersection were tracked for a full seven seconds of acceleration, however variations in acceleration profiles for first and second row vehicles can be seen during the first five seconds. At 5 seconds, first row vehicles had accelerated to approximately 23 mph, while second row vehicles had reached approximately 19 mph. Tables detailing acceleration rates for all four phases are provided in Appendix A.
It should be noted that driver actions can contribute to outlier data points. The accelerations calculated in this study are not representative of the maximum accelerations these vehicles are capable of, but instead demonstrate the naturalistic acceleration of drivers operating within their comfort zone. Higher rates of acceleration are possible depending on the actions of the driver; drivers may also accelerate at a lower rate if outside factors are affecting their concentration or comfort level. Should a reconstructionist have knowledge of the driving style of the driver and any roadway factors such as construction zones, darkness, or traffic, such outlier data can be considered as valid should the situation require.
Deceleration
Inspection of the deceleration plot for all tracked runs show a wide range of initial speeds, ranging from approximately 20-50 mph. This wide range of initial speeds is partially the result of inconsistencies in the beginning of deceleration for vehicles tracked during this study. Some vehicles began their deceleration prior to entering the frame, and therefore were not tracked during the first portion of their deceleration. However, this inconsistency does not detrimentally affect the data, as many vehicles began their deceleration after entering the frame and the overall range of speeds narrows after the first second of tracking. Furthermore, outlier data as previously discussed was removed from analysis. For example, one test vehicle began decelerating from approximately 65 mph, far exceeding the road speed limit. This test was removed as it did not accurately depict a naturalistic braking scenario for most drivers.
Analysis of the data shows a linear rate of deceleration during the first 6 seconds of tracking. After 6 seconds, many vehicles had nearly come to rest, with vehicles continuing to decelerate at a lower rate. For the first 6 seconds of tracking, the dataset shows an average deceleration rate of 0.19 g. The phase from 6 to 8 seconds is characterized by a deceleration rate of 0.09 g. While some test vehicles continued to decelerate after 8 seconds, restrictions in the effectiveness of the data tracking process at very low speeds mean that the data collected may be unreliable. Therefore, data after 8 seconds was not used for determining deceleration profiles for this study.
Comparison of the deceleration profiles for first and second row vehicles show similar linear trends, however variations can be noted in the initial speed and overall rate of deceleration. Vehicles decelerating from the first row tend to have a higher initial speed than vehicles which are second to reach the intersection, resulting in a higher rate of deceleration for first row vehicles. Vehicles in the second row have a slightly lower initial speed, and thus have a lower rate of deceleration. The deceleration rates for first and second row vehicles were 0.22 g and 0.17 g, respectively. Figure 27 shows the speed versus time plot for all tracked decelerating vehicles, with the linear trendline shown in black.

The deceleration model trendline is shown in Figure 28 with plots of individual test runs removed for clarity.

It should be noted that driver actions can contribute to outlier data points and variations in deceleration rates between vehicles in the first and second rows. First row vehicles encountering a changing traffic signal are forced to decide whether to stop or proceed through the intersection. Vehicles positioned in the second row typically have more time to react to the changing traffic signal and are also influenced by the actions of the vehicle in front of them. Should a reconstructionist have knowledge of the traffic light condition at the time of the incident along with the driver’s actions resulting from the signal change, such outlier data can be considered as valid.
Analysis of previous vehicle acceleration and deceleration research has shown that data can typically be extrapolated to include speeds and distances that may not have been included in the study, assuming the roadway conditions and other variables remain consistent. This extrapolation is possible due to the comfort level of drivers. While a passenger vehicle is capable of decelerations far exceeding those determined in this paper, drivers in a naturalistic scenario are most likely to decelerate at a rate which they feel comfortable. Therefore, a driver will most likely decelerate at approximately the same rate independent of their initial speed, allowing for the deceleration data to be extrapolated. It is important to note that this extrapolation will only influence the time and travel distance of the first deceleration phase. The second deceleration phase (6-8 seconds) includes the final adjustments in braking required for a driver to come to a controlled stop either at the stop line or behind another vehicle, which remained consistent regardless of the tracked vehicle’s initial speed in the captured runs.
Acceleration Lag Time
As a secondary consideration, data was analyzed to determine the time elapsed from when the first vehicle at an intersection initiates its acceleration to when the vehicle directly behind begins accelerating. The lag time between the two vehicles accelerations can assist a reconstructionist in completing a time-space analysis for a vehicle stopped at an intersection. 93 vehicles from the dataset were compared to determine the lag time in accelerations. The average calculated lag time before second row vehicles began accelerating was approximately 1.1 seconds. Large variations in the calculated lag time resulted in a standard deviation of 0.69 seconds.
Trends relating to both straight line accelerations and decelerations were evident upon analysis of the passenger vehicle video tracking data, as shown in this paper.
The average accelerations for passenger vehicles were divided into four phases to accurately follow the acceleration profile determined from the test data. The average accelerations calculated for each phase are listed in Table 2. Also listed in Table 2 is the percent decrease in acceleration row 2 vehicles displayed in comparison to row 1 vehicles. Tables of calculated acceleration and deceleration values are provided in Appendix A.

Analysis of the processed data shows trends relating to the accelerations for first and second row vehicles. First row vehicles accelerated at a greater rate than second row vehicles throughout the entire tracking period. Additionally, comparison of data collected at the two intersections show slightly higher average rates of acceleration for vehicles at 56th and Quebec than vehicles from 92nd and Federal. The average of all processed runs resulted in an acceleration rate of 0.12 g for the first second, 0.26 g from one to three seconds, 0.22 g from three to five seconds, and 0.17 g from five to seven seconds.
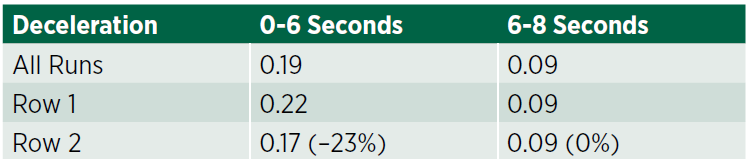
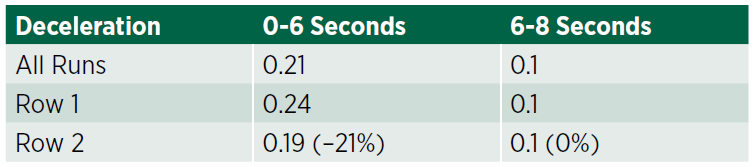
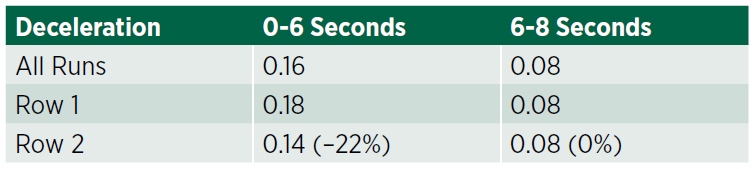
The average decelerations for passenger vehicles were determined to follow a linear trend. The deceleration averages calculated for all runs are listed in Table 3. Also listed in Table 3 is the percent decrease in deceleration row 2 experienced compared to row 1.
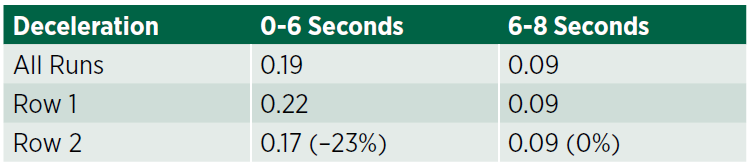
Analysis of the processed data shows trends similar to those found from the captured acceleration data. First row vehicles decelerated at a greater rate than those in the second row. Differences in deceleration were noted when comparing data from the two separate intersections, however the differences in deceleration rate were minor. The average of all processed runs resulted in a deceleration rate of 0.19 g from 0 to 6 seconds, and a deceleration rate of 0.09 g for 6 to 8 seconds.
These calculations can be applied directly to accident reconstruction to determine the time, distance, and speed required for passenger vehicles to either traverse or brake to a stop at a controlled intersection.
We would like to thank David Danaher, Sean McDonough, Drew Donaldson & Reece Cochran for providing insight and expertise that greatly assisted this research.
David Danaher is a Senior Engineer in J.S. Held’s Accident Reconstruction Practice. His casework involves major mechanical systems, heavy equipment, and motor vehicles. As a professional mechanical engineer, Mr. Danaher has experience in the areas of mechanical design and operation as well as failure analysis. His experience involves product design evaluation, strength of materials analysis, and failure mechanics. Mr. Danaher has also analyzed mechanical components that are part of larger industrial systems to demonstrate their operation as well as any related failures, at locations both nationwide and internationally. The analysis performed in these industrial systems is then illustrated in a three-dimensional environment, breaking down individual components to visually show the mechanics of the operation.
David can be reached at [email protected] or +1 303 733 1888.
Sean McDonough is a Senior Engineer in J.S. Held’s Accident Reconstruction Practice. Sean evaluates vehicular accidents to determine the sequence of events leading up to the accident, using 3D scanning and surveying to generate a 3D environment to accurately reconstruct the accident. He also employs accepted principles of crush energy, impact momentum, and planar mechanics to determine speeds, principle direction of force (PDOF), and with the use of PC Crash, he evaluates time and spatial relationships of vehicular accidents. In addition to the wide range of crashes that he has analyzed, Mr. McDonough brings a wealth of automotive maintenance expertise.
Sean can be reached at [email protected] or +1 303 733 1888.
Drew Donaldson is an Accident Reconstructionist in J.S. Held’s Accident Reconstruction Practice. Drew is dedicated to investigation and vehicular accident reconstruction. In this field, he analyzes evidence, conducts vehicle and scene inspections, and performs calculations using principles of physics. Additionally, Drew has extensive experience in machine shop fabrication and automotive racing safety, design, and fabrication techniques. Drew is involved in vehicular accident reconstruction and analysis, mechanical systems design and failure analysis, technical research and writing of publications furthering the capabilities of accident reconstructionists, and investigating new methods of physical evidence and terrain data capture through aerial surveying.
Drew can be reached at [email protected] or +1 303 733 1888.
Reece Cochran is an Accident Reconstructionist in J.S. Held’s Accident Reconstruction Practice.
Reece can be reached at [email protected] or +1 303 733 1888.
[1] Fugger, T., Wobrock, J., Randles, B., Stein, A. et al., “Driver Characteristics at Signal-Controlled Intersections,” SAE Technical Paper 2001-01-0045 (2001), doi:10.4271/2001-1-0045.
[2] Chang, M., Messer, C., and Santiago, A., “Timing Traffic Signal Change Intervals Based on Driver Behavior,” Transportation Research Record 1027 (1985).
[3] Haas, R., Inman, V., Dixson, A., and Warren, D., “Use of Intelligent Transportation System Data to Determine Driver Deceleration and Acceleration Behavior,” Transportation Research Record 1899 (2004), doi:10.3141/1899-01.
[4] Wortman, R. and Matthias, J., “Evaluation of Driver Behavior at Signalized Intersections,” Transportation Research Record 904 (1983).
[5] Roenitz, E., Happer, A., Johal, R., and Overgaard, R., “Characteristic Vehicular Deceleration for Known Hazards,” SAE Technical Paper 1999-01-0098 (1999), doi:https://doi.org/10.4271/1999-01-0098.
[6] Kodsi, S. and Muttart, J., “Modeling Passenger Vehicle Acceleration Profiles from Naturalistic Observations and Driver Testing at Two-Way-Stop Controlled Intersections,” SAE Int. J. Passeng. Cars - Mech. Syst. 3, no. 1 (2010): 45-56, doi:https://doi.org/10.4271/2010-01-0062.
[7] Carter, N., Beier, S., and Cordero, R., “Lateral and Tangential Accelerations of Left Turning Vehicles from Naturalistic Observations,” SAE Technical Paper 2019-01-0421 (2019), doi:10.4271/2019-01-0421.
Appendix A contains tables of average longitudinal acceleration and deceleration rates for tracked passenger vehicles, classified by intersection, and the row in which the vehicle stopped at the intersection. Row 2 values for the individual intersection tables also include the calculated percentage difference in acceleration/deceleration rate from those calculated for first row vehicles.



Photoscanning photogrammetry is a method for obtaining and preserving three-dimensional site data from photographs. This photogrammetric method is commonly associated with small Unmanned Aircraft Systems (sUAS) and is particularly beneficial for large area site documentation...
This paper presents a methodology for utilizing publicly available LiDAR data from the United States Geological Survey (USGS) in combination with high-resolution aerial imagery to establish GCPs based on preexisting site landmarks. This method is...
Ground-based Light Detection and Ranging (LiDAR) using FARO Focus 3D scanners (and other brands of scanners) are repeatedly shown to accurately capture the geometry of accident scenes, accident vehicles, and exemplar vehicles, as well as...